Transfert en cours..., vous êtes sur le "nouveau" serveur data.abuledu.org dont l'hébergement est financé par l'association abuledu-fr.org grâce à vos dons et adhésions !
Vous pouvez continuer à soutenir l'association des utilisateurs d'AbulÉdu (abuledu-fr.org) ou l'association ABUL.
Suivez la progression de nos travaux et participez à la communauté via la liste de diffusion.
Votre recherche ...
Nuage de mots clés

Figurine de baby-foot
Les lignes de figurines d'un baby-foot sont liées à la table par un pivot glissant. La liaison par pivot glissant s'obtient lorsque tous les points de contact appartiennent à un ou plusieurs cylindres coaxiaux. Les normales de contact rencontrent toutes l’axe de ces cylindres qui devient naturellement l’axe de la liaison. C’est la seule direction caractéristique. Cette liaison se comporte comme deux liaisons linéaires annulaires. Elle dispose de 4 degrés de liaison puisqu'elle lie les deux translations et les deux rotations transversales. Les degrés de liberté sont la translation et la rotation axiale. Si la rotation peut facilement présenter une amplitude infinie (au moins un tour), la translation se limite aux dimensions des pièces. La définition complète de cette liaison doit préciser la position de l'axe. S'agissant d'une droite, elle n'est complète que si on précise deux points lui appartenant, ou un point et une direction. Cette direction est d'ailleurs la seule qui se distingue.
Dessins et plans, Outillage, Limes (outils), Cinématique, Rabots, Dispositifs de serrage de la pièce, Machines -- Cinématique
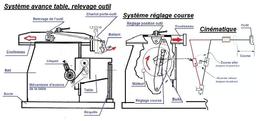
Cinématique de l'étau limeur
Etau limeur : cinématique de la course du coulisseau et de l'avance table. L’étau limeur est une machine à raboter mais travaillant à l’inverse d’une raboteuse, dans le sens que la pièce reste immobile pendant la passe alors que l’outil effectue le mouvement de coupe rectiligne. L’architecture d’un étau limeur est constituée de : 1) le bâti en fonte contenant les organes mécaniques (moteur électrique, hydraulique ou pneumatique ; boîte de vitesse ; système bielle-manivelle ; mécanisme d’avance de la table porte-pièce) ; 2) le coulisseau qui se déplace horizontalement sur le dessus du bâti et qui porte le chariot porte-outil ; 3) la table porte pièce qui coulisse sur une glissière horizontale, qui elle-même coulisse sur une autre glissière verticale. Cette table, selon les modèles, peut pivoter selon un axe parallèle à la trajectoire du coulisseau et être soutenue en bout par bretelle (ou béquille) ; 4) un socle fixé au sol et supportant l’ensemble.
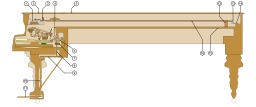
Coupe d'un piano à queue
Coupe d'un piano à queue : 1 et 14) Cadre métallique, 2) Abattant du couvercle, 3) Capo d'astro ou barre harmonique, 4) Tête d'étouffoir, 5) Couvercle, 6) Chevalet d'étouffoir (ou pivot des étouffoirs ?), 7) Rail des chevalets d'étouffoir (ou barre de forte ?), 8) Barre de transmission de la pédale forte, 9) Levier de la transmission du forte, 10) Tige de Lyre, 11) Pédale, droite (forte), gauche (piano), 12) Chevalet, 13) Cheville d'accord (pointe d'accroche), 15) Table d'harmonie, 16) Corde. Le piano à queue est constitué : d'un clavier, généralement à 88 touches (7 octaves 1/4), muni d'un couvercle ; d'un barrage, structure en poutres ; d'une table d'harmonie, mise en vibration par les cordes par l'intermédiaire de chevalets ; de cordes : une par note dans les graves, deux dans les notes intermédiaires, trois dans les aiguës. Les cordes d'aigus sont nues, les cordes de graves sont filées ; d'un cadre métallique au-dessus de la table d'harmonie (sur les pianos modernes) ; d'une ceinture, coffrage entourant la table d'harmonie ; d'un couvercle s'ouvrant à 45° ; d'une mécanique de percussion ; d'un pédalier (lyre) ; d'un pupitre.
Dessins et plans, Mécanique, Physique, Génie mécanique, Amortissement (mécanique), Analyse mécanique dynamique, Construction mécanique, Contact de roulement, Mécanique appliquée, Mécanique du contact
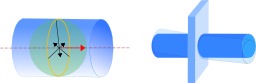
Force appliquée sous forme annulaire
Mécanique : force appliquée selon une forme annulaire. La modélisation des liaisons mécaniques s'appuie d'abord sur l'analyse de la géométrie de contact entre deux pièces. Dans un premier temps, lorsque les géométries sont considérées parfaites, on obtient un premier modèle présentant un certain nombre de degré de liaison ; ce modèle suppose un ajustement « glissant sans jeu », la liaison modélisée est dite « idéale ». Si l'on est en présence d'un jeu plus important, certains degrés de liaison disparaissent. Cela revient à considérer que les pièces flottent dans cet espace rendu disponible par le jeu. Si l'on veut modéliser correctement le comportement du système, il faut alors utiliser une autre liaison idéale que celle obtenue par l'analyse initiale. En particulier, pour avoir des machines performantes, il faut s'assurer que le mécanisme est conçu pour assurer aux pièces des positions exploitant ces jeux (alignements corrects). Ainsi, une liaison obtenue par emboîtement, sans jeu, deux cylindres complémentaires parfaits, constitue une liaison pivot glissant ; on parle de « centrage long ». Si on ajoute un jeu radial à cet ajustement, et qu'on diminue la longueur de portée, alors les deux cylindres peuvent se déplacer latéralement (mais cela reste imperceptible) et obliquer par rapport à la direction de l'axe. La liaison idéale qu'il faut utiliser pour modéliser l'assemblage est alors la liaison linéaire annulaire, et l'on parle de « centrage court ».

Parties fonctionnelles d'une machine automatisée
Un mécanisme est un ensemble de pièces dont au moins une est mobile par rapport aux autres. Le but d'un mécanisme est de réaliser un mouvement tout en effectuant un effort, soit essentiellement : saisir un objet et le déplacer ou déformer de la matière (fabrication, marquage). Le mécanisme agit sur un objet, éventuellement sur une personne ou un animal (par exemple dans le cas d'un véhicule, d'un ascenseur). Un tel système comporte : A) une partie commande (PC) : 1) pupitre de commande et de contrôle : c'est l'interface avec l'utilisateur, il comprend des moyens d'action (manivelles, manettes, pédales, boutons, volants, …) et de contrôle (voyants, cadrans) ; il peut s'agir d'un ordinateur. 2) automate : tout ou partie des opérations peut s'effectuer sans l'intervention d'une personne, 3) sécurités : évite l'accident ; B) une partie opérative (PO) : 1) effecteurs : ce sont les pièces qui agissent sur l'objet, 2) guidage : ce sont les pièces qui assurent que l'effecteur suit bien le mouvement prévu, comme les rails (déplacement en translation), les charnières (pivotement), … 3) actionneurs : ce sont les pièces qui provoquent le mouvement : moteurs, vérins, … 4) capteurs : ce sont les pièces qui renseignement la partie commande et permettent la régulation : détecteurs de position, de mouvement, thermomètre, … Source : http://fr.wikiversity.org/wiki/M%C3%A9canique_pour_l%27enseignement_technique_industriel/Notions_de_m%C3%A9canisme_et_de_structure.