Transfert en cours..., vous êtes sur le "nouveau" serveur data.abuledu.org dont l'hébergement est financé par l'association abuledu-fr.org grâce à vos dons et adhésions !
Vous pouvez continuer à soutenir l'association des utilisateurs d'AbulÉdu (abuledu-fr.org) ou l'association ABUL.
Suivez la progression de nos travaux et participez à la communauté via la liste de diffusion.
Votre recherche ...
Nuage de mots clés
Dessins et plans, Mouvement de rotation, Mouvement de translation (physique), Mouvement rotatoire, Mouvements, Plans de translation
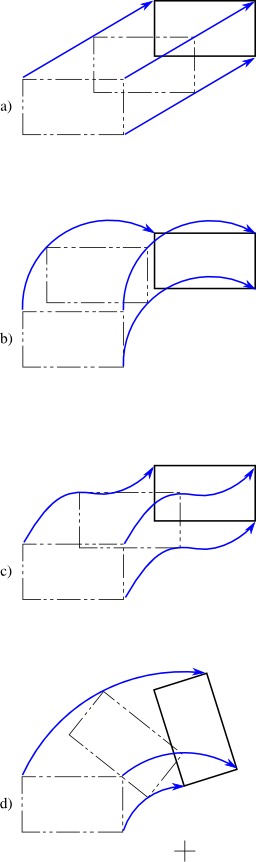
Quatre types de mouvements plans
4 types de mouvements plans : a = translation rectiligne ; b = translation circulaire ; c = translation curviligne ; d = rotation.
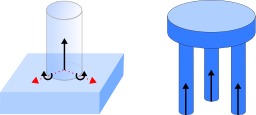
Force appliquée selon un appui plan
Force appliquée selon un appui plan : la liaison appui plan, appelée aussi liaison plane, présente 3 degrés de liaison. Ils forcent le mouvement à rester dans un plan. Les deux translations et la rotation dans ce plan sont libres. L'appui des trois pieds d’un tabouret sur un sol plan constitue une liaison plane. Le quatrième pied d’une chaise ne touche le sol que si les extrémités des pieds sont parfaitement coplanaires ; le système est alors hyperstatique les liaisons étant en surnombre par rapport au besoin de guidage. Un mécanisme est l'association de plusieurs pièces liées entre elles par des contacts physiques qui les rendent totalement ou partiellement solidaires, selon qu'ils autorisent ou non des mouvements relatifs. La liaison mécanique est le modèle utilisé pour décrire cette relation dont la considération est primordiale dans l'étude des mécanismes. Elle emploie des représentations mathématiques qui diffèrent suivant qu'on l'aborde sous l'aspect cinématique (étude des mouvements ou guidages) ou sous l'aspect statique (étude de la transmission d'efforts). La notion de liaison mécanique se définit plus généralement entre groupes de pièces, appelés classes d'équivalence contenant respectivement des pièces entièrement solidaires. Un mécanisme est l'association de plusieurs pièces liées entre elles par des contacts physiques qui les rendent totalement ou partiellement solidaires, selon qu'ils autorisent ou non des mouvements relatifs. Elle emploie des représentations mathématiques qui diffèrent suivant qu'on l'aborde sous l'aspect cinématique (étude des mouvements ou guidages) ou sous l'aspect statique (étude de la transmission d'efforts). La notion de liaison mécanique se définit plus généralement entre groupes de pièces, appelés classes d'équivalence contenant respectivement des pièces entièrement solidaires.

Photographie, Symétrie, Symétrie (art), Frises, Architecture romaine, Translation (physique), Mouvement de
Frise décorative en architecture
Frise décorative imitant l'antique, 138-146 West 14° Rue, entre la 6° et la 7° Avenues à Manhattan, New York City datant de 1899. Les frises décoratives en architecture sont souvent des structures symétriques par translation : si on déplace la structure de la largeur d'un motif, on retrouve la même structure.

Parties fonctionnelles d'une machine automatisée
Un mécanisme est un ensemble de pièces dont au moins une est mobile par rapport aux autres. Le but d'un mécanisme est de réaliser un mouvement tout en effectuant un effort, soit essentiellement : saisir un objet et le déplacer ou déformer de la matière (fabrication, marquage). Le mécanisme agit sur un objet, éventuellement sur une personne ou un animal (par exemple dans le cas d'un véhicule, d'un ascenseur). Un tel système comporte : A) une partie commande (PC) : 1) pupitre de commande et de contrôle : c'est l'interface avec l'utilisateur, il comprend des moyens d'action (manivelles, manettes, pédales, boutons, volants, …) et de contrôle (voyants, cadrans) ; il peut s'agir d'un ordinateur. 2) automate : tout ou partie des opérations peut s'effectuer sans l'intervention d'une personne, 3) sécurités : évite l'accident ; B) une partie opérative (PO) : 1) effecteurs : ce sont les pièces qui agissent sur l'objet, 2) guidage : ce sont les pièces qui assurent que l'effecteur suit bien le mouvement prévu, comme les rails (déplacement en translation), les charnières (pivotement), … 3) actionneurs : ce sont les pièces qui provoquent le mouvement : moteurs, vérins, … 4) capteurs : ce sont les pièces qui renseignement la partie commande et permettent la régulation : détecteurs de position, de mouvement, thermomètre, … Source : http://fr.wikiversity.org/wiki/M%C3%A9canique_pour_l%27enseignement_technique_industriel/Notions_de_m%C3%A9canisme_et_de_structure.