Transfert en cours..., vous êtes sur le "nouveau" serveur data.abuledu.org dont l'hébergement est financé par l'association abuledu-fr.org grâce à vos dons et adhésions !
Vous pouvez continuer à soutenir l'association des utilisateurs d'AbulÉdu (abuledu-fr.org) ou l'association ABUL.
Suivez la progression de nos travaux et participez à la communauté via la liste de diffusion.
Votre recherche ...
Géométrie du vélo horizontal à traction directe
Description de la ressource
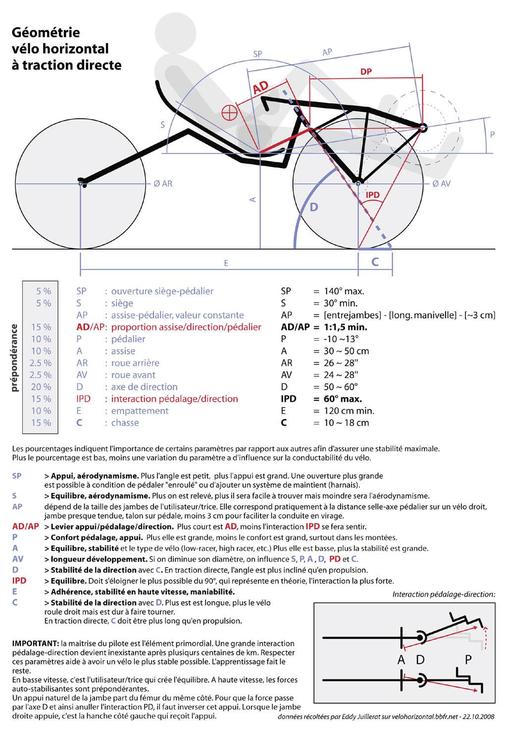
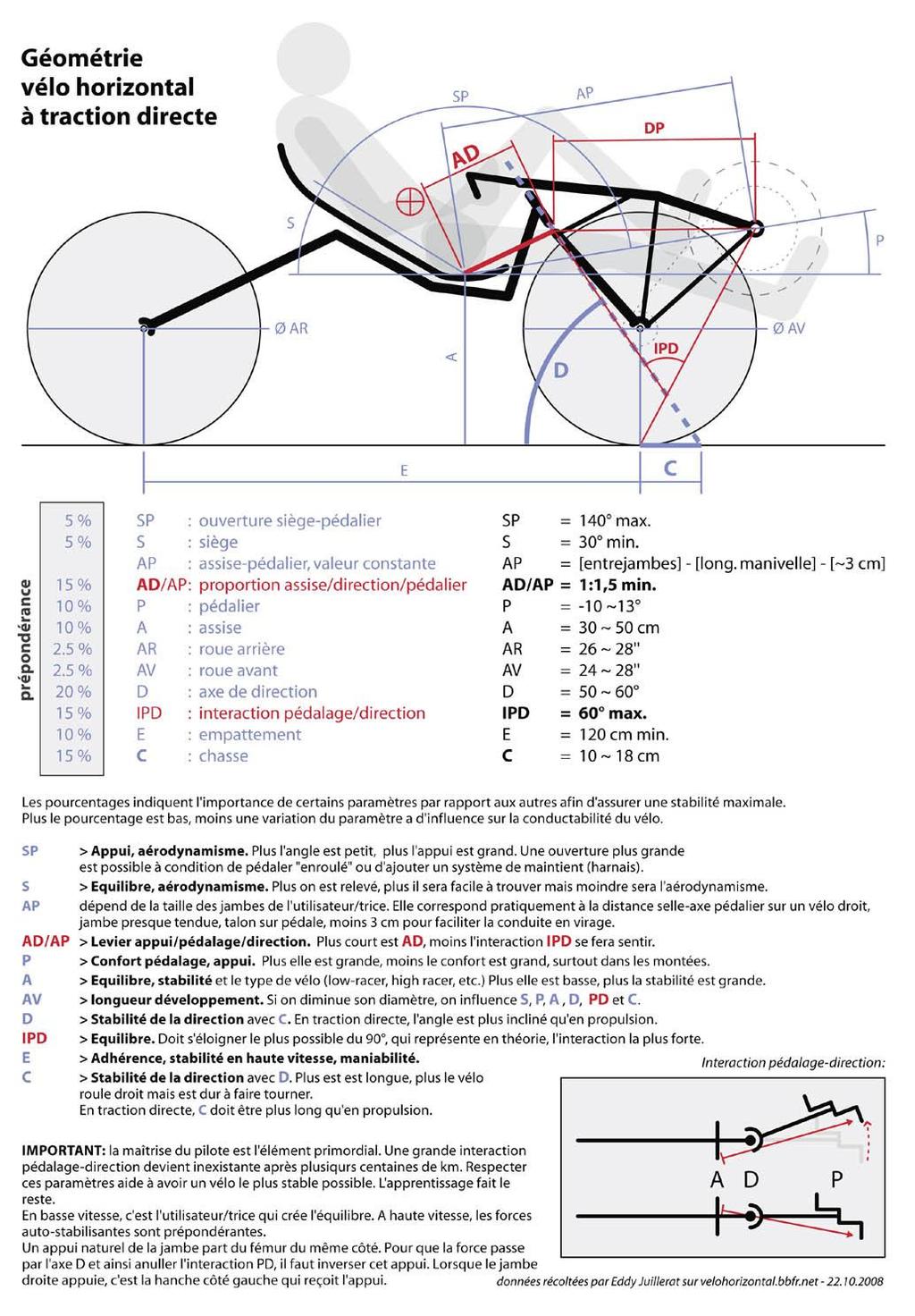
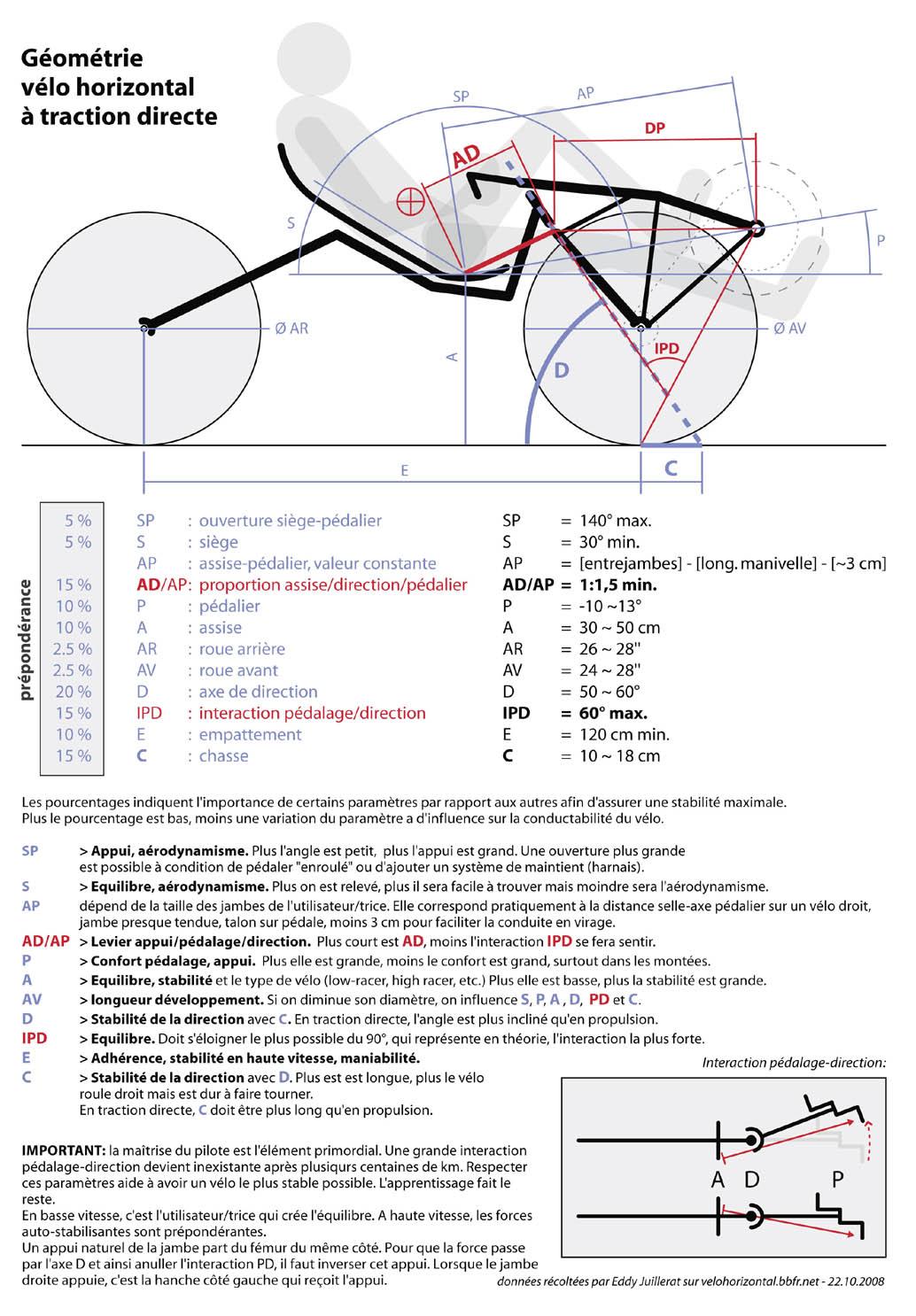
Géométrie du vélo horizontal à traction directe : Un vélo couché à traction directe se différencie du vélo couché traditionnel par son pédalier, solidaire de la direction. La plupart des vélos couché sont dits "à propulsion". Leur géométrie est calquée sur celles des vélos droits, ou bicyclettes. La chaîne transmet la force du pédalier à la roue arrière, passant par toute la longueur du cadre. Si celui-ci n'est pas extrêmement rigide, une bonne partie de l'énergie fournie au pédalier est perdue. La géométrie du vélo à traction directe permet de minimiser cette perte en transmettant l'énergie à la roue avant. La conséquence est que le pédalier tourne avec la direction, nécessitant un apprentissage. L'appui sur les pédales influence la direction. On parle d'interaction pédalage/direction. Ce modèle fourni les paramètres recommandés afin d'obtenir un vélo qui soit le plus stable possible et dont l'interaction pédalage/direction soit des plus faibles. Les pourcentages indiquent l'importance de certains paramètres par rapport aux autres afin d'assurer une stabilité maximale. Plus le pourcentage est bas, moins une variation du paramètre a d'influence sur la conductabilité du vélo. La maîtrise du pilote est l'élément primordial. Une grande interaction pédalage-direction devient inexistante après plusieurs centaines de km. Respecter ces paramètres aide à avoir un vélo le plus stable possible. L'apprentissage fait le reste. En basse vitesse, c'est l'utilisateur/trice qui crée l'équilibre. A haute vitesse, les forces auto-stabilisantes sont prépondérantes. Un appui naturel de la jambe part du fémur du même côté. Pour que la force passe par l'axe D et ainsi annuler l'interaction PD, il faut inverser cet appui. Lorsque la jambe droite appuie, c'est la hanche côté gauche qui reçoit l'appui.
Détails de la ressource
- Déposé par : Anne-Marie Lesca, le 2013-08-02
- Auteur : E10310
- Origine : http://commons.wikimedia.org/wiki/File:Geometrie_TD_03_2.jpg
- Licence : pd
- Format : image/jpeg
- Type :
- Collection :
- Description ScolomFR : http://data.abuledu.org/LOM/doc0000012084.xml
{kind=link}
Téléchargement
512 - 1024 - Fichier Original - Source + Métadonnées SCOLOMFR
{kind=link}
{kind=link}
Relations et mots clés
Dessins et plans, Géométrie, Vélos couchés, Vélos horizontaux