Transfert en cours..., vous êtes sur le "nouveau" serveur data.abuledu.org dont l'hébergement est financé par l'association abuledu-fr.org grâce à vos dons et adhésions !
Vous pouvez continuer à soutenir l'association des utilisateurs d'AbulÉdu (abuledu-fr.org) ou l'association ABUL.
Suivez la progression de nos travaux et participez à la communauté via la liste de diffusion.
Votre recherche ...
Nuage de mots clés
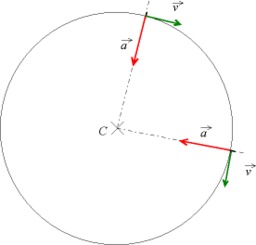
Cinématique
Mouvement circulaire uniforme : la vitesse est tangentielle et l'accélération est centripète, perpendiculaire au mouvement, son travail est nul. Ce cas ne doit pas laisser penser qu'une force dont le travail est nul n'a aucun effet sur un système. Ainsi, dans le cas d'un solide en mouvement circulaire uniforme, la force centripète a un travail nul (le mouvement circulaire uniforme n'est pas modifié). Pour autant, si l'on supprime la force centripète le solide cessera son mouvement circulaire et se déplacera en mouvement rectiligne, conformément à la 1re loi de Newton. Les forces dont le travail est nul ne modifient pas l'énergie cinétique du solide. En particulier, elles ne modifient pas la norme de la vitesse ; elles peuvent cependant en modifier la direction.
Dessins et plans, Outillage, Limes (outils), Cinématique, Rabots, Dispositifs de serrage de la pièce, Machines -- Cinématique
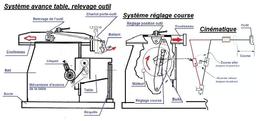
Cinématique de l'étau limeur
Etau limeur : cinématique de la course du coulisseau et de l'avance table. L’étau limeur est une machine à raboter mais travaillant à l’inverse d’une raboteuse, dans le sens que la pièce reste immobile pendant la passe alors que l’outil effectue le mouvement de coupe rectiligne. L’architecture d’un étau limeur est constituée de : 1) le bâti en fonte contenant les organes mécaniques (moteur électrique, hydraulique ou pneumatique ; boîte de vitesse ; système bielle-manivelle ; mécanisme d’avance de la table porte-pièce) ; 2) le coulisseau qui se déplace horizontalement sur le dessus du bâti et qui porte le chariot porte-outil ; 3) la table porte pièce qui coulisse sur une glissière horizontale, qui elle-même coulisse sur une autre glissière verticale. Cette table, selon les modèles, peut pivoter selon un axe parallèle à la trajectoire du coulisseau et être soutenue en bout par bretelle (ou béquille) ; 4) un socle fixé au sol et supportant l’ensemble.
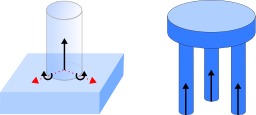
Force appliquée selon un appui plan
Force appliquée selon un appui plan : la liaison appui plan, appelée aussi liaison plane, présente 3 degrés de liaison. Ils forcent le mouvement à rester dans un plan. Les deux translations et la rotation dans ce plan sont libres. L'appui des trois pieds d’un tabouret sur un sol plan constitue une liaison plane. Le quatrième pied d’une chaise ne touche le sol que si les extrémités des pieds sont parfaitement coplanaires ; le système est alors hyperstatique les liaisons étant en surnombre par rapport au besoin de guidage. Un mécanisme est l'association de plusieurs pièces liées entre elles par des contacts physiques qui les rendent totalement ou partiellement solidaires, selon qu'ils autorisent ou non des mouvements relatifs. La liaison mécanique est le modèle utilisé pour décrire cette relation dont la considération est primordiale dans l'étude des mécanismes. Elle emploie des représentations mathématiques qui diffèrent suivant qu'on l'aborde sous l'aspect cinématique (étude des mouvements ou guidages) ou sous l'aspect statique (étude de la transmission d'efforts). La notion de liaison mécanique se définit plus généralement entre groupes de pièces, appelés classes d'équivalence contenant respectivement des pièces entièrement solidaires. Un mécanisme est l'association de plusieurs pièces liées entre elles par des contacts physiques qui les rendent totalement ou partiellement solidaires, selon qu'ils autorisent ou non des mouvements relatifs. Elle emploie des représentations mathématiques qui diffèrent suivant qu'on l'aborde sous l'aspect cinématique (étude des mouvements ou guidages) ou sous l'aspect statique (étude de la transmission d'efforts). La notion de liaison mécanique se définit plus généralement entre groupes de pièces, appelés classes d'équivalence contenant respectivement des pièces entièrement solidaires.